
Policy Gradient Methods
Background
本书前面的部分主要讲的都是学习价值函数的方法,这里提出一种直接学习策略的方法,这里把策略记作一个带有参数的,即
Advantage
优点之一是可以学习一个确定性的算法而不像
Policy Gradient
在直接学习策略的时候,正确地更新参数
对于分幕式任务,在经过推导(RLBook2020 P325)后,得到:
这里虽然只找出了正比关系,但是在梯度下降的时候,只关注梯度的方向,并不关心梯度真正的值是多少
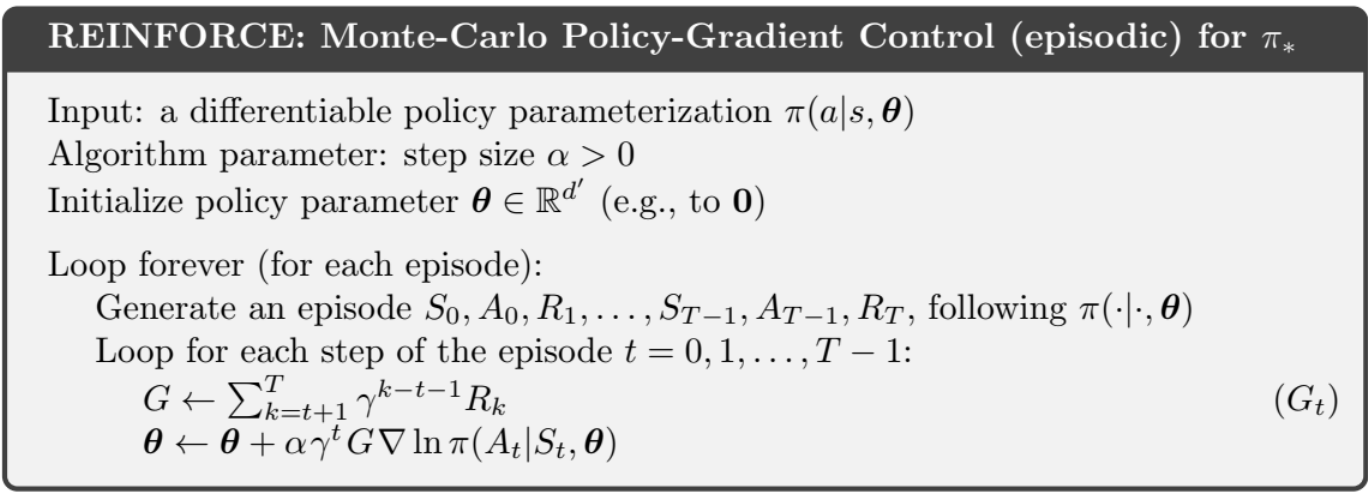
Monte Carlo Policy Gradient
根据上面的式子,写成期望的形式:
那么就可以得出梯度下降的公式:
其中 all-actions methods 因为它包含了该状态所有可能的动作
这里的
所以这里的更新公式就变成了:
这里还有一个小 trick 因为我们知道对数函数的梯度是自己的倒数,即
这样可以得到一个算法:
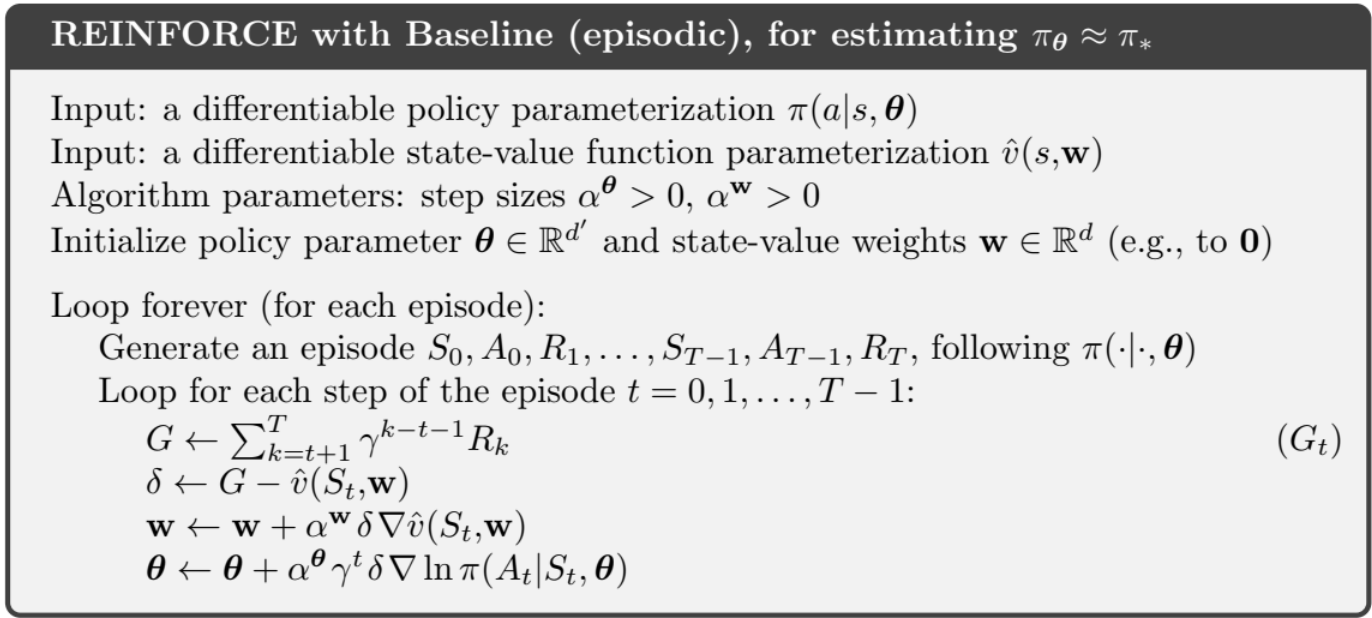
# Reinforce with Baseline
首先,和前面的 Tabular Solution Methods 里面使用的技巧是一样的,由于
所以可以改变式
这样不会改变梯度的方向,这个时候,我们选择使用
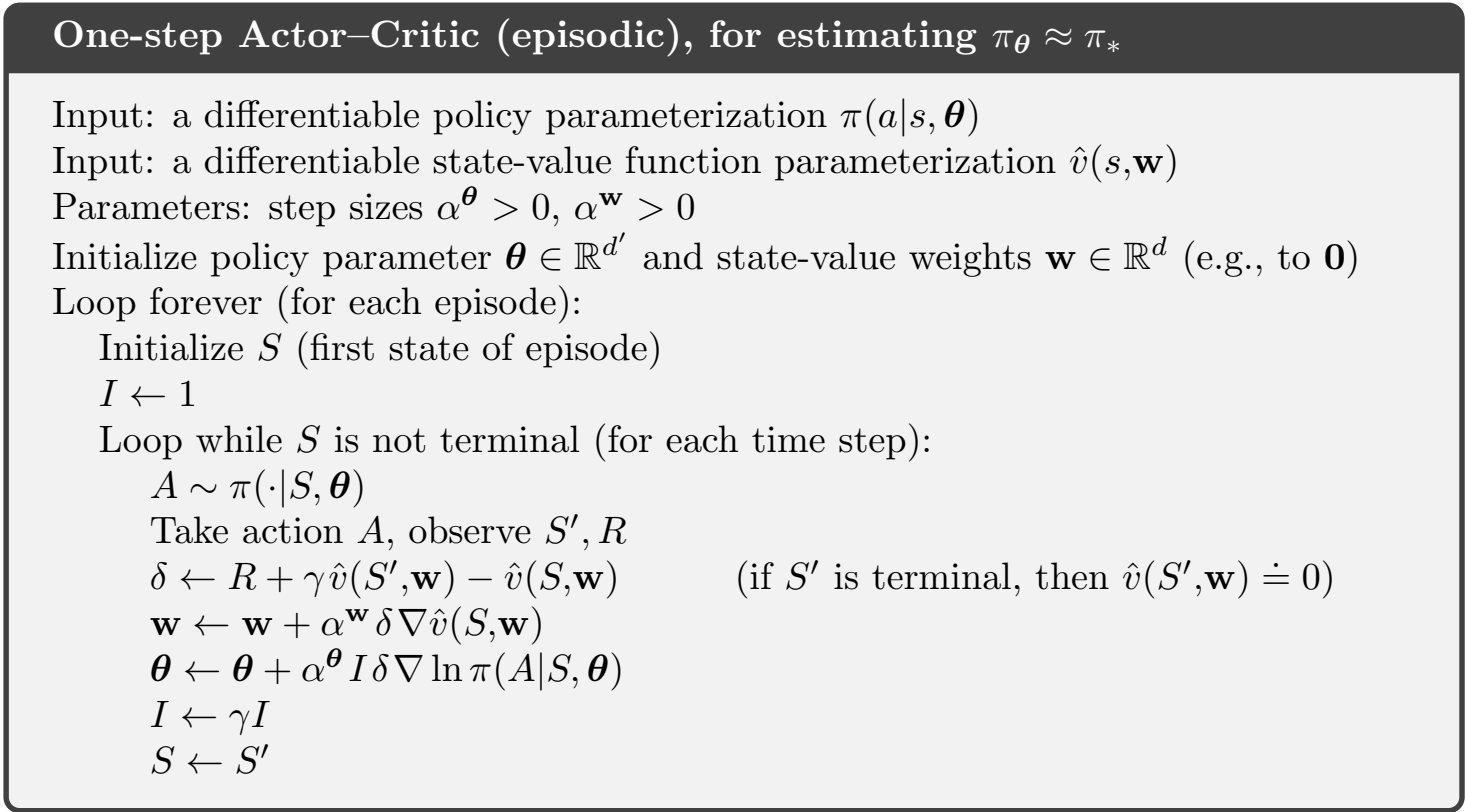
# Actor–Critic Methods
这个方法和前面的方法非常类似,只是这个方法不需要等到整个Episode运行结束再进行更新,这两者之间的差别和TD和蒙特卡洛方法很类似,即:
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.